先说下开发环境.VS2013,C++空项目,引用glut,glew.glut包含基本窗口操作,免去我们自己新建win32窗口一些操作.glew使我们能使用最新opengl的API,因winodw本身只包含opengl 1.1版本的API,根本是不能用的.
其中矩阵计算采用gitHub项目openvr中的三份文件, Vectors.h ,Matrices.h, Matrices.cpp,分别是矢量与点类,矩阵类,我们需要的一些操作,矢量的叉乘和点乘,矩阵转置,矩阵的逆,矩阵与矢量相剩等.
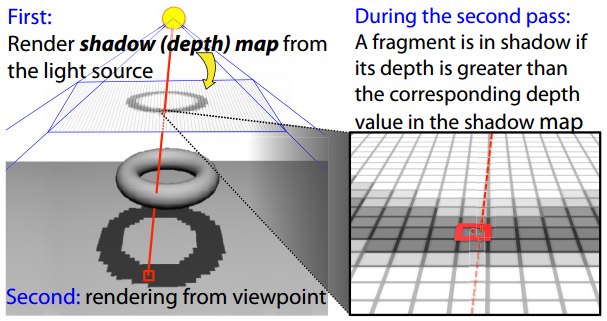
这里主要简单介绍这二种阴影实现.Shadow Mapping简单来说,就是以灯光为视角,得到整个场景的深度图(深度图请看下面一段仔细说明).然后在正常视角下,把顶点转化成原灯光视角下的顶点,根据顶点位置找到深度纹理中存放的深度,如果顶点的深度值大于纹理中的深度值(说明在灯光视角中,顶点上有遮挡物,如下图),说明在阴影范围内.
(此图引用博友中图片)
在这里,有必要讲一下深度图,不然有些位置大家可能理解不了,这个深度图是全屏渲染图,意思就是是场景中的三维物体经过投影成二维,这样就达到一种效果,纹理坐标与三维物体的坐标是有对应关系的,简单来说,三维物体经过投影后,我们经过(xyzw)/w,这样x,y,z 都在(-1,1)之间,再经过乘0.5加0.5后对应(0,1)之间,也就是深度图的纹理坐标,这过程和3D中物体由局部坐标到屏幕坐标的变换(屏幕Y是从上到下,还需要转换,这里先不说)一样.那么深度图一共包含了二样关系,一是纹理坐标st,对应3维中顶点xy.二是深度图本身保存的深度,这个深度是经过深度测试和深度写入(所以这二个GL_DEPTH_TEST, glDepthMask记的打开)的深度,默认的是深度比较算法是画家算法(GL_LESS,不要改),意思是深度度上全是最近的深度.
这样深度图就是一个三维场景,结合摄像机的设置,就可以把这个场景所有像素都重新投影到三维空间中去.
在附件中, Shadow Mapping主要有二种实现,一种是固定管线,一种是可编程管线,我们先看下固定管线的实现流程,再对比可编程管线的实现来理解整个过程.
如下是固定管线中纹理初始化的设置.


glActiveTexture(GL_TEXTURE1); glEnable(GL_TEXTURE_2D); glGenTextures(1, &shadowTexture); glBindTexture(GL_TEXTURE_2D, shadowTexture); // 纹理和光照计算结果相乘 glTexEnvi(GL_TEXTURE_ENV, GL_TEXTURE_ENV_MODE, GL_MODULATE); glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_WRAP_S, GL_CLAMP_TO_EDGE); glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_WRAP_T, GL_CLAMP_TO_EDGE); glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MAG_FILTER, GL_LINEAR); glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MIN_FILTER, GL_LINEAR); //GL_LUMINANCE 把深度值替换到RGB三个分量上,GL_INTENSITY则替换到RGBA四个分量上.(深度值只有一个) //简单来说,就是定义深度如何保存,如果是GL_ALPHA,则替换到第四个分量上. //glTexParameteri(GL_TEXTURE_2D, GL_DEPTH_TEXTURE_MODE, GL_LUMINANCE);// GL_LUMINANCE); // This is to allow usage of shadow2DProj function in the shader //纹理本身存的是深度值,而纹理坐标经过转换后成对应点的坐标. 纹理坐标R点比较纹理本身 glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_COMPARE_MODE, GL_COMPARE_R_TO_TEXTURE);//GL_NONE GL_COMPARE_R_TO_TEXTURE //比较方法,少于或等于是1,大于是0 glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_COMPARE_FUNC, GL_LEQUAL);//GL_GEQUAL,GL_LEQUAL //使用API自动生成的纹理坐标 glEnable(GL_TEXTURE_GEN_S); glEnable(GL_TEXTURE_GEN_T); glEnable(GL_TEXTURE_GEN_R); glEnable(GL_TEXTURE_GEN_Q); glTexGeni(GL_S, GL_TEXTURE_GEN_MODE, GL_OBJECT_LINEAR); glTexGeni(GL_T, GL_TEXTURE_GEN_MODE, GL_OBJECT_LINEAR); glTexGeni(GL_R, GL_TEXTURE_GEN_MODE, GL_OBJECT_LINEAR); glTexGeni(GL_Q, GL_TEXTURE_GEN_MODE, GL_OBJECT_LINEAR); glTexImage2D(GL_TEXTURE_2D, 0, GL_DEPTH_COMPONENT, shadowWidth, shadowHeight, 0, GL_DEPTH_COMPONENT, GL_FLOAT, 0); //FBO 把桢缓冲区的深度输出到shadowTexture纹理中 glGenFramebuffers(1, &frameBuffer); glBindFramebuffer(GL_DRAW_FRAMEBUFFER, frameBuffer); glFramebufferTexture2D(GL_DRAW_FRAMEBUFFER, GL_DEPTH_ATTACHMENT, GL_TEXTURE_2D, shadowTexture, 0); glBindFramebuffer(GL_DRAW_FRAMEBUFFER, 0); glBindTexture(GL_TEXTURE_2D, 0);
其中有几个主要设置拿出来说下:
glTexParameteri(GL_TEXTURE_2D, GL_DEPTH_TEXTURE_MODE, GL_LUMINANCE);
这个是让纹理值替换深度到那些分量上,我们知道纹理一个像素是4分量,分别是rgba,其中GL_LUMINANCE把深度复制到rgb中, GL_INTENSITY 则是rgba中, GL_ALPHA复制到a中,这个我试了,在固定管线下,不设置也行,在可管程管线中,则要根据设置的值取不同的分量.
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_COMPARE_MODE, GL_COMPARE_R_TO_TEXTURE);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_COMPARE_FUNC, GL_LEQUAL);
这二设定一个是指明纹理是是引用贴图对比模式,指明纹理坐标R(strq,r是纹理第三分量)对比纹理本身的值.第二个设置是第一对比模式的补充,说明小于或等于是1,而大于是0.
最后glTexGeni指明纹理坐标生成方式, GL_OBJECT_LINEAR指明是在模型空间内,顶点坐标拿来纹理坐标.
在这里,我们把桢缓冲区的数据转出到纹理,采用的是FBO的方式,如果硬件不能使用FBO,大家可以改写用Pbuffer或CopyPixels的方式.
然后在渲染时,我们首先以灯光做为视点,生成视图坐标,选择一个合适的透视矩阵,输出深度到深度纹理中.
//写入深度到FBO中,以灯光为视角 glBindFramebuffer(GL_DRAW_FRAMEBUFFER, frameBuffer); //颜色不需要输出 glColorMask(false, false, false, false); glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT); glViewport(0, 0, shadowWidth, shadowHeight); glMatrixMode(GL_PROJECTION); glLoadIdentity(); gluPerspective(90.0f, shadowWidth / shadowHeight, 1.0f, 1000.0f); glGetFloatv(GL_PROJECTION_MATRIX, lightProjection); glMatrixMode(GL_MODELVIEW); glLoadIdentity(); gluLookAt(lightpos.x, lightpos.y, lightpos.z, 0.f, 0.f, 0.f, 0.f, 1.0f, 0.f); glGetFloatv(GL_MODELVIEW_MATRIX, lightModelview); this->drawModel(true); glBindFramebuffer(GL_DRAW_FRAMEBUFFER, 0);
然后我们需要记录当前MVP矩阵,在前面说过,MVP后要转化(-1,1)到(0,1),所以前面还需要*0.5+0.5.纹理坐标生成采用GL_OBJECT_LINEAR,下面为了glTexGenfv传参方便,我们转置一下矩阵.这样顶点经过这个转换后,自动生成的纹理坐标其实是对应的原灯光视图下的顶点.
//纹理矩阵变换 自动生成纹理坐标转化成顶点坐标float tempMat[16];glPushMatrix();glLoadIdentity();glTranslatef(0.5f, 0.5f, 0.5f);glScalef(0.5f, 0.5f, 0.5f);// Proj * Model 将纹理坐标转到世界空间glMultMatrixf(lightProjection);glMultMatrixf(lightModelview);glGetFloatv(GL_MODELVIEW_MATRIX, tempMat);glLoadTransposeMatrixf(tempMat);glGetFloatv(GL_MODELVIEW_MATRIX, tempMat);glPopMatrix();
最后我们正常输出场景,在这里,记得前面设定的GL_COMPARE_R_TO_TEXTURE不,纹理坐标大于纹理深度值则是阴影.
//正常输出 glColorMask(true, true, true, true); glViewport(0, 0, widht, height); glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT); glMatrixMode(GL_PROJECTION); glLoadIdentity(); gluPerspective(45.0f, (GLfloat)this->widht / (GLfloat)this->height, 0.1f, 100.0f); //加载视图矩阵 this->mcamera->lookat(); //添加一个点光源. float pos[4] = { lightpos.x, lightpos.y, lightpos.z, 1.0 }; glLightfv(GL_LIGHT0, GL_POSITION, pos); //输出地面,采用模型本身的纹理坐标 glActiveTexture(GL_TEXTURE0); glBindTexture(GL_TEXTURE_2D, planeTexture); //输出地面,采用API自动生成的纹理坐标 glActiveTexture(GL_TEXTURE1); glBindTexture(GL_TEXTURE_2D, shadowTexture); glTexGenfv(GL_S, GL_OBJECT_PLANE, &tempMat[0]); glTexGenfv(GL_T, GL_OBJECT_PLANE, &tempMat[4]); glTexGenfv(GL_R, GL_OBJECT_PLANE, &tempMat[8]); glTexGenfv(GL_Q, GL_OBJECT_PLANE, &tempMat[12]); mplane->draw(); //记的关掉纹理,不然会影响下面模型 glActiveTexture(GL_TEXTURE0); glBindTexture(GL_TEXTURE_2D, 0); glActiveTexture(GL_TEXTURE1); glBindTexture(GL_TEXTURE_2D, 0); //输出球,灯,茶壶 sphLight->position.x = lightpos.x; sphLight->position.y = lightpos.y; sphLight->position.z = lightpos.z; this->drawModel(false); glutSwapBuffers(); 说起来就是这么回事,但是仔细回想下,其实完全都是由openGL内部实现,我们完全搞不清楚真的是怎么实现的,我们用的也是一些API,大家可能也对实现过程N多疑惑,那么下面可编程管线实现的Shadow Mapping能让我们完全搞清楚怎么回事,也没有这些GL_COMPARE_R_TO_TEXTURE, GL_LEQUAL,纹理坐标自动生成这些完全不知道内部操作的设定.
首先我们需要对Plane改写,支持VBO渲染,增加一个类glslprogram用于管理着色器相关.
void plane::drawShader(int pos, int tex) { if (!this->bCreate) { this->init(); } mat->draw(); glBindBuffer(GL_ARRAY_BUFFER, vboId); glEnableVertexAttribArray(pos); glEnableVertexAttribArray(tex); glVertexAttribPointer(tex, 2, GL_FLOAT, false, 20, (void*)0); glVertexAttribPointer(pos, 3, GL_FLOAT, false, 20, (void*)8); glBindBuffer(GL_ELEMENT_ARRAY_BUFFER, eboId); glDrawElements(GL_TRIANGLES, indexCount, GL_UNSIGNED_INT, 0); glDisableVertexAttribArray(pos); glDisableVertexAttribArray(tex); } 下面是可编程管线的初始化代码.
glActiveTexture(GL_TEXTURE1); glGenTextures(1, &shadowTexture); glBindTexture(GL_TEXTURE_2D, shadowTexture); // 纹理和光照计算结果相乘 glTexEnvi(GL_TEXTURE_ENV, GL_TEXTURE_ENV_MODE, GL_BLEND); glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_WRAP_S, GL_CLAMP_TO_EDGE); glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_WRAP_T, GL_CLAMP_TO_EDGE); glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MAG_FILTER, GL_LINEAR); glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MIN_FILTER, GL_LINEAR); //GL_LUMINANCE 把深度值替换到RGB三个分量上,GL_INTENSITY则替换到RGBA四个分量上.(深度值只有一个) //简单来说,就是定义深度如何保存,如果是GL_ALPHA,则替换到第四个分量上. glTexParameteri(GL_TEXTURE_2D, GL_DEPTH_TEXTURE_MODE, GL_ALPHA);// GL_LUMINANCE); glTexImage2D(GL_TEXTURE_2D, 0, GL_DEPTH_COMPONENT, shadowWidth, shadowHeight, 0, GL_DEPTH_COMPONENT, GL_FLOAT, 0); glBindTexture(GL_TEXTURE_2D, 0); //FBO 把桢缓冲区的深度输出到shadowTexture纹理中 glGenFramebuffers(1, &frameBuffer); glBindFramebuffer(GL_DRAW_FRAMEBUFFER, frameBuffer); glFramebufferTexture2D(GL_DRAW_FRAMEBUFFER, GL_DEPTH_ATTACHMENT, GL_TEXTURE_2D, shadowTexture, 0); glBindFramebuffer(GL_DRAW_FRAMEBUFFER, 0);
可以发现,少了很多前面单独拿出来说的设定,这里只是让FBO把深度输出到纹理中,纹理中用float保存.
输出FBO同上面一样,不同的正常输出场景,在这里,我们设定好着色器相关的参数.传入顶点着色器中.
//输出地面,采用模型本身的纹理坐标 glActiveTexture(GL_TEXTURE0); glBindTexture(GL_TEXTURE_2D, planeTexture); //输出地面,采用API自动生成的纹理坐标 glActiveTexture(GL_TEXTURE1); glBindTexture(GL_TEXTURE_2D, shadowTexture); auto svM = Matrix4::setCamera(lightpos.x, lightpos.y, lightpos.z, 0.f, 0.f, 0.f); auto spM = Matrix4::setFrustum(90.0f, shadowWidth / shadowHeight, 1.0f, 1000.0f); auto eye = mcamera->getEye(); auto target = mcamera->getTarget(); auto vM = Matrix4::setCamera(eye.x, eye.y, eye.z, target.x, target.y, target.z); auto pM = Matrix4::setFrustum(45.0f, (GLfloat)this->widht / (GLfloat)this->height, 0.1f, 100.0f); Matrix4 mM; mM.translate(mplane->position.x, mplane->position.y, mplane->position.z); program.enable(); program.setUniformMatrix("shadowViewMat", svM.get()); program.setUniformMatrix("shadowProMat", spM.get()); program.setUniformMatrix("nm", mM.get()); program.setUniformMatrix("nv", vM.get()); program.setUniformMatrix("np", pM.get()); program.setUniform("normal", 0.f, 1.f, 0.f); program.setUniform("texture2D", 0); program.setUniform("uShadowMap", 1); mplane->drawShader(0, 1); program.disable(); #version 330 compatibilityuniform mat4 shadowViewMat;uniform mat4 shadowProMat;uniform mat4 nm;uniform mat4 nv;uniform mat4 np;layout(location = 1)in vec2 iTexCoord;layout(location = 0)in vec3 ipos;out vec4 oShadowTexCoord;out vec2 oTexCoord;out vec4 wordPos;void main() { vec4 mvpPos = np*nv*nm * vec4(ipos,1.0); //阴影绘制中的透视坐标x,y,z in (-1,1) vec4 shadowTex = shadowProMat*shadowViewMat* nm * vec4(ipos,1.0); //(x,y,z,w) -> (x/w,y/w,z/w,1) = (x,y,z in [-1,1]) oShadowTexCoord = shadowTex / shadowTex.w; //(-1,1) To (0,1)纹理坐标 这样纹理坐标rt就对应点x,y oShadowTexCoord = 0.5 * oShadowTexCoord + 0.5; wordPos = nm * vec4(ipos,1.0); gl_Position = mvpPos; oTexCoord = iTexCoord;} 我们可以看到oShadowTexCoord代表顶点(这是正常场景坐标)转化成原灯光视图下的坐标.并转化到(0,1)之间,然后到像素着色器中.
#version 330 compatibility//uniform sampler2DShadow uShadowMap;uniform sampler2D uShadowMap;uniform sampler2D texture2D;uniform vec3 normal;in vec4 oShadowTexCoord;in vec2 oTexCoord;in vec4 wordPos;void main(){ float noshadow = 1.0; //深度纹理中的深度值. float depth = texture(uShadowMap, oShadowTexCoord.xy).a; //现在在渲染的顶点深度值 float depth1 = oShadowTexCoord.z; if(depth < depth1) noshadow = 0.5; //纹理颜色 vec4 textColor = texture(texture2D,oTexCoord); //外部环境光 vec4 color = gl_FrontMaterial.ambient * gl_LightModel.ambient; //灯光散射光 vec4 diffuse = gl_FrontMaterial.diffuse * gl_LightSource[0].diffuse; vec4 ambient = gl_FrontMaterial.ambient * gl_LightSource[0].ambient; vec3 halfV = normalize(gl_LightSource[0].halfVector.xyz); vec3 lightdir = normalize( vec3(gl_LightSource[0].position) - wordPos.xyz); float dist = length(vec3(gl_LightSource[0].position) - wordPos.xyz); float NdotL = max(0.0, dot(lightdir, normal)); if (NdotL > 0.0) { float att = 1.0 / (gl_LightSource[0].constantAttenuation + gl_LightSource[0].linearAttenuation * dist + gl_LightSource[0].quadraticAttenuation * dist * dist); color += att * (diffuse * NdotL + ambient); float specular = max(dot(normal,halfV),0.0); specular = pow(specular, gl_FrontMaterial.shininess); color += att * gl_FrontMaterial.specular * gl_LightSource[0].specular * specular; } vec3 rgb = color.rgb * textColor.rgb*2; gl_FragColor = vec4(rgb,textColor.a)*noshadow;} 在像素着色器中,纹理坐标st取出深度值a(前面我设定GL_DEPTH_TEXTURE_MODE为GL_ALPHA,想一下,取r,g,b会不会有效果),然后比较纹理坐标r与纹理值来判断是否有阴影.其中有一段光照代码,在这就没必要看了,只要知道生成光照就行了,在像素着色器中,阴影显示成什么颜色我们能也完全控制了,通过着色器代码的实现,我们应该很清楚Shadow Mapping是如何工作的了.
当然在可编程管线下,我们一样是可以使用GL_TEXTURE_COMPARE_MODE- GL_COMPARE_R_TO_TEXTURE的,这样我们需要把sampler2D改写成sampler2Dshadow,用纹理坐标取出来的深度值就只有0和1了,OpenGL自己帮我们比较了,为0则表示GL_LEQUAL失败,在阴影中.
说完了Shadow Mapping,我们来了解下Shadow Volumes的原理,如下图:
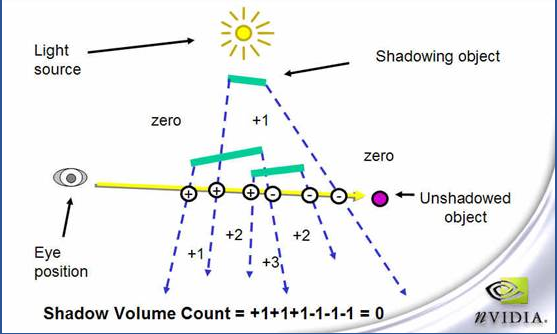
简单来说,就是在灯光与顶点扩展成锥体形式,进入锥体就加模板值1,出去锥体就减模板值1,最后判断模板值不为0则是阴影区域,原理可以比说Shadow Mapping还简单,确实Shadow Volumes难的不是理念,更多是如何形成有效简便的锥体结构.在这说,我们主要讲解Shadow Volumes是工作原理,故采用二来简单的三角形来说明.
在说明代码之前,我们需要先了解模版缓冲区与模版测试.模版测试属于片断处理,在像素着色器之后,先进行Alpha测试后就是模版测试,模版测试后是深度测试,记的模版测试在片断着色器之后,深度测试之前,这个测试针对的就是模版缓冲区,你可以把模版缓冲区当做和深度缓冲区差不多的东东,每个像素有一个模板值,初始我们一般设为0,有API能对此进行操作.然后我们还需要知道在opengl中,我们把逆时针连接的面称为正面,另一面就是反面.
Shadow Volumes简单来说,一般包含三次Pass.三次Pass都需要开启深度测试.
第一次我们正常渲染模型.先清空颜色,深度,模版缓冲区,然后打开深度缓冲区可写.先不用打开模版测试.(注意glut也需要在窗口初始化时传入模板参数)
//第一次PASS 写入深度 glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT | GL_STENCIL_BUFFER_BIT); glClearStencil(0); glColorMask(GL_TRUE, GL_TRUE, GL_TRUE, GL_TRUE); //深度缓冲区可写 glDepthMask(GL_TRUE); glDisable(GL_STENCIL_TEST); this->mcamera->lookat(); sphLight->position.x = lightpos.x; sphLight->position.y = lightpos.y; sphLight->position.z = lightpos.z; sphLight->draw(); glNormal3f(0, 1, 0); mplane->draw(); glMaterialfv(GL_FRONT_AND_BACK, GL_AMBIENT, material::blue); glMaterialfv(GL_FRONT_AND_BACK, GL_DIFFUSE, material::green); drawTri(tri1); glMaterialfv(GL_FRONT_AND_BACK, GL_AMBIENT, material::green); glMaterialfv(GL_FRONT_AND_BACK, GL_DIFFUSE, material::blue); drawTri(tri2);
第二次我们得到阴影区,关闭颜色缓冲区可写,关闭深度缓冲区可写(注意深度测试还是打开的,意思可以比较现在写入的深度与以前的深度,但是不会更新到深度缓冲区),打开模版测试,重置模板缓冲区内所有数据为0,设定模板测试直接通过,模板缓冲区操作时设定,正面通过深度缓冲区后加1,反面通过测试缓冲区减1. 注意前面说的,深度测试在模板测试之后,模板测试通过了才有深度测试,在这里,我们设定模板直接通过,深度测试不通过不修改,只有模板与深度全通对模板缓冲区修改,所以也叫zpass算法.
下面三图分别指示正面通过(+1),反面通过(-1)和正反相加的情形:


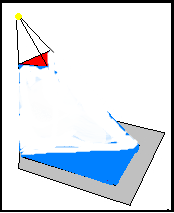
前二图是在http://www.yakergong.net/blog/archives/23 中的,不知为啥没给出我想要的第三图,我就自己画了,第一张图上淡蓝色是正面(截体外面)通过深度测试的像素(模板加1),第二张图是背面通过深度测试的像素(模板减1),第三张图就是模板值还是1的像素,也就是我们的阴影区域.从上图知,通过第一张图(正面测试的)像素个数是第二和第三张图之和,我们可以验证.
//第二次pass glPushAttrib(GL_ALL_ATTRIB_BITS); glColorMask(GL_FALSE, GL_FALSE, GL_FALSE, GL_FALSE); glDisable(GL_LIGHT0); //glStencilOpSeparate 需要关闭面向裁剪 glDisable(GL_CULL_FACE); //深度可写关闭 不会覆盖没有像素 注意:深度测试一直打开的 glEnable(GL_DEPTH_TEST); glDepthMask(GL_FALSE); glDepthFunc(GL_LESS); //开启模板测试 glEnable(GL_STENCIL_TEST); //模板比较函数 glStencilFunc(GL_ALWAYS, 0, 0xFF); glClearStencil(0); // p1:面向 p2:模板没通过测试 p3:模板通过测试,深度测试没通过 p4:深度测试通过 glStencilOpSeparate(GL_FRONT, GL_KEEP, GL_KEEP, GL_INCR_WRAP); glStencilOpSeparate(GL_BACK, GL_KEEP, GL_KEEP, GL_DECR_WRAP); //mplane->draw(); drawTriVolume(tri1); drawTriVolume(tri2); //读取模版值 //vectordata; //data.resize(widht*height); //glReadPixels(0, 0, widht, height, GL_STENCIL_INDEX, GL_UNSIGNED_BYTE, data.data()); //int index = 0; //for_each(data.begin(), data.end(), [&index](unsigned char x){ // if (x != 0) // { // index++; // } //}); //cout << index << endl;
有些读取模板取的代码在上面屏掉,大家可以分别测试glStencilOpSeparate中的1:GL_FRONT启用,2:GL_BACK启用,3二者都启用,看看是否第一种情况的像素值是第二和第三之和.
第三次Pass,渲染上面的阴影区.下面的一些状态我就不仔细说了,代码里有注释,主要是打开模板测试,把整个屏幕刷黑,但是只有模板值为1的像素才能通过测试,更新颜色到桢缓冲区.
//第三次pass 画阴影,在全屏幕蒙板值不为0的地方画阴影 glEnable(GL_STENCIL_TEST); glStencilFunc(GL_NOTEQUAL, 0, 0xFF); glStencilOp(GL_KEEP, GL_KEEP, GL_KEEP); //2.打开颜色缓存,画出阴影 glColorMask(GL_TRUE, GL_TRUE, GL_TRUE, GL_TRUE); //3.开混合,让阴影颜色和阴影所再物体的本来颜色混合一下 glEnable(GL_BLEND); //glBlendFunc(GL_ONE, GL_ONE); glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA); //4.全屏画阴影 在模版测试时,只有前面有阴影的地方才被画上 glMatrixMode(GL_PROJECTION); glPushMatrix(); glLoadIdentity(); glOrtho(0, widht, 0, height, -1, 1); glMatrixMode(GL_MODELVIEW); glPushMatrix(); glLoadIdentity(); //全屏黑色 在模版测试时,只有前面有阴影的地方才被画上 glMaterialfv(GL_FRONT, GL_AMBIENT, material::gray); glRectf(0.0, 0.0, widht, height); glDrawArrays(GL_TRIANGLE_STRIP, 0, 4); glMatrixMode(GL_PROJECTION); glPopMatrix(); glMatrixMode(GL_MODELVIEW); glPopMatrix(); glPopAttrib();
zpass主要就是上面的过程,不过有个缺点,就是视点进入到了 shadow volume 里面后,zpass算法就失效了,大家可以移步里有详细说明.在此基础上,几个牛人研究出了zfail方法.原理如下图:
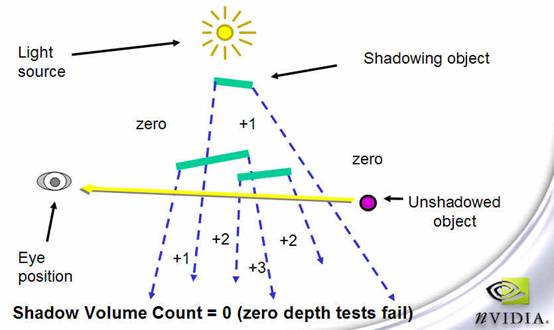
如前面所说,深度测试在模板测试之后,模板测试通过了才有深度测试,如果模板测试通过,深度测试不通过,zfail就是在这步针对模板值修改,因其与zpass大部分相同,只是在第二步pass得到阴影区域的计算不同,故只贴出这部分代码.
//第二次pass glPushAttrib(GL_ALL_ATTRIB_BITS); glColorMask(GL_FALSE, GL_FALSE, GL_FALSE, GL_FALSE); glDisable(GL_LIGHT0); //glStencilOpSeparate 需要关闭面向裁剪 glDisable(GL_CULL_FACE); //深度可写关闭 不会覆盖没有像素 注意:深度测试一直打开的 glDepthMask(GL_FALSE); glEnable(GL_DEPTH_TEST); glDepthFunc(GL_LESS); //开启模板测试 glEnable(GL_STENCIL_TEST); //模板比较函数 glStencilFunc(GL_ALWAYS, 0, 0xFF); glClearStencil(0); // p1:面向 p2:模板没通过测试 p3:模板通过测试,深度测试没通过 p4:深度测试通过 glStencilOpSeparate(GL_FRONT, GL_KEEP, GL_INCR_WRAP, GL_KEEP); // 改进后 glStencilOpSeparate(GL_BACK, GL_KEEP, GL_DECR_WRAP, GL_KEEP); //mplane->draw(); drawTriVolume(tri1); drawTriVolume(tri2);
参考:
下面是附件,其中camera提供第一人称与第三人称摄像机实现,loadtexture实现了bmp图片文件的导入,plane与sphere分别对应平面与球的实现,其中window原本是打算用win32实现,后面用glut代替,sample开头的文件分别对应shadow mapping固定管线,可编程管线与shadow volume中的zpass与zfail实现,这四个类分别是glshow的子类,在main中,直接修改glshow分别是那种子类,就能看各个效果.引用的头文件与lib,dll全放入lib文件夹下,其中二个dll文件在32位操作环境放入C:\Windows\System32,64位操作系统放入C:\Windows\SysWOW64.
附件: 打不开或是出错请联系我.